I’m not sure. I suspect that regardless of CNC or robot there are similarly limit positions of joints to achieve any particular Vector XYZ position. The path to get there may be more complex on a robot than a CNC for no other reason that all the axis are stacked unlike with a CNC where the axis are usually split between two stacks.
However in both cases one would think it would be a matter of simply hierarchy as to which axis takes president for which movements.
Not just the point, but also the angle of the end effector to that point, in case of MIG weld the push/pull angle as well as side to side angle can have bigger impact than the welder settings.
I actually don’t think so. Again, assuming an XYZ and vector, which is the same for a CNC except for the fact that in a CNC the “Vector” is limited to a single plane, there are very few solutions to any position.
So for instance, the situation below. The green rod shown in space is the vector and the end of the rod is the XYZ position. There are only two solutions.
This…
image.png
And this
image.png
The only other axis with any degree of freedom is the sixth axis which is essentially the same as a spindle on any machine. So in reality a 3-Axis CNC is really a four axis robot.
The joints in a robot are not ball joints with two degrees of freedom, they are axis with a single degree of freedom. This is pretty easy to prove in a SW model. With the sixth axis locked concentric and the end mated to the end the robot can’t move even though all the other joints still have a degree of freedom left unlocked.
In fact I believe that robots don’t operate well when they run into situations with “Multiple possible solutions” and they are called “Singularities” and those positions are to be avoided if possible.
Unless I’m missing something, which is entirely possible, there typically are not multiple solutions for robot positions. Even in this case more than likely the first position shown is not possible due to over travel conditions.
If you got the model, fix the center point at the end or the face.
See if any of the join move.
Unless you’re pretty far out, I believe it’ll.
The problem is, every moving part need collision check.
That’s what I’m saying. I have mated the face of axis 6 to the face of the cylinder. I then mated the axis 6 concentric to the cylinder. Cylinder in space is fixed. Robot no move, it can’t. This is typical of most positions.
That however does not mean that there are no other solutions. As I’ve shown sometimes, some joints could be positive an angle or negative and angle. Many, in fact in most cases, that is even limited by travel.
You can even do it visually at each joint. The bottom joint1 is a rotary at the XY plane. Can it rotate even if the other joints move some how? No, it can’t because the only joints that would allow it are J4 or J5. If you move J4 or J5 you then come off axis of the cylinder.
Now certainly there are multiple solutions if you remove the vector aspect, but I’ve not seen many applications where a certain vector is not necessary. Most end effectors require mating with what it needs to at a certain vector, think drilling a hole. You’ve got to come in perpendicular to however you want the hole to be. Even applications where you can have multiple different vectors typically you pick one or some combination of vectors.
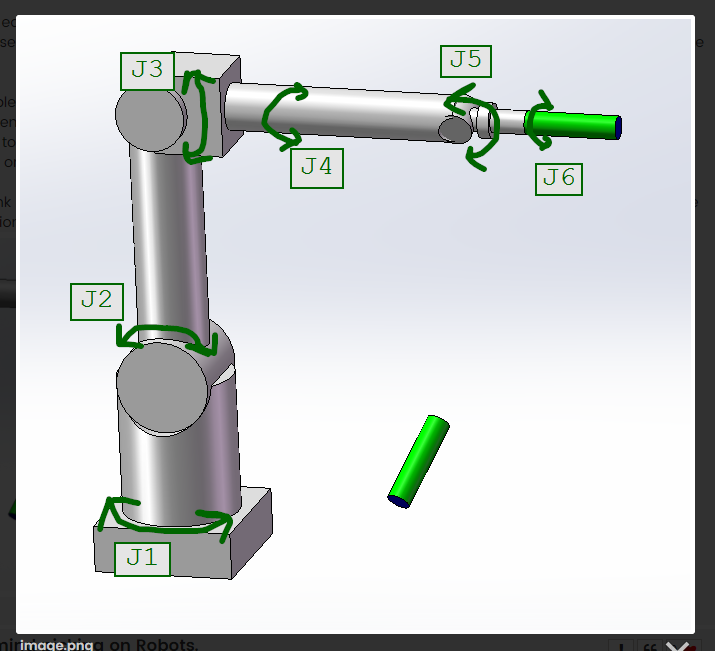
As stated where I actually think robots have issues are where they DO run into situations where you have an “Unlimited” possible solutions “Singularities”. Situations like this where J4 is free to rotate.
image.png
I realize this is a Kindergarten level question and picture, but trying to make sure I’m following correctly. The arrows and labels are correct and what you’re speaking of MJuric ?
Yep, correct. If you look at J4 in this case it can spin around it’s axis. This is actually a case where the possible positions available to the robot are only limited to the resolution of the axis. These cases, at least in my understanding, are rare and are to be avoided if possible.
There are a few of these positions possible with a robot, however, every other position only has a couple possible solutions and in most cases, only two where one joint can be either positive or negative angle.
Keep in mind this is all coming from a complete Novice with robots so could be completely wrong
But from what I can tell from the model the possible solutions for any position are pretty limited. I think the possibilities for getting to those positions are larger with a robot than a three axis CNC, but final possible ending positions solutions are very similar.